














 302-303 / 568
302-303 / 568

-בן
יה יצחק הלוי
.
: מנחה
מר צחי שוחט
.
הנדסה מכנית
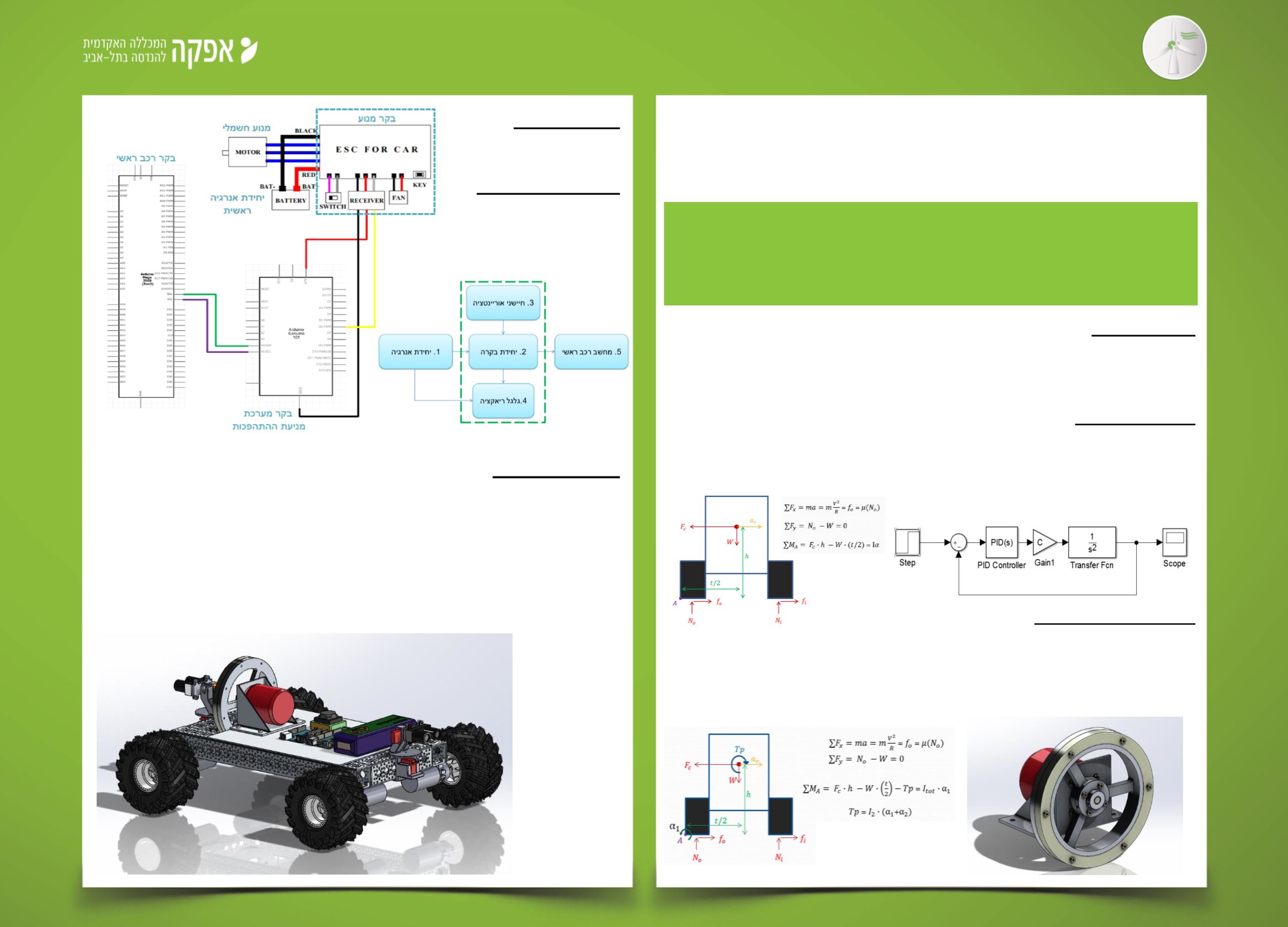
מערכת בקרה למניעת התהפכות
ברכב רובוטי אוטונומי
–
'ג"
וניור
"
דרישות עיקריות
:
•
מניעת התהפכות הרכב בנסיעה במישור וצמצום הסיכון להתהפכות בתנאי סביבה
. משתנים
•
יכולת מניעת התהפכות גם כאשר הרכב לא בנסיעה
,
כתוצאה מכוחות חיצוניים
.
מערכת בקרת בלימה
:
מערכת בקרת הבלימה מבוססת על עקרונות התנועה המעגלית והתפתחות
כוחות צנטריפוגליים
,
כתוצאה מתנועת הרכב
.
בזמן ביצוע תמרונים ופניות
,
נכנס הרכב
למצב של תנועה מעגלית
זמנית
,
בה מופיע כוח צנטריפוגלי העשוי לפעול להפיכת הרכב
.
כוח זה מושפע ישירות ממהירות
הרכב בזמן ביצוע הפניה
,
לכן נוכל להשפיע על גודל כוח זה ע
"
י שינוי המהירות
.
מערכת בקרת
גלגל ריאקציה
:
המערכת מבוססת
על
החוק
השלישי של ניוטון
,
אשר קובע כי לכל פעולה
המתרחשת
,
ישנה
פעולה נגדית
שווה בגודלה
,
העובדת
בכיוון ההפוך
.
בעזרת
גלגל ריאקציה
המחובר למנוע חשמלי
ומורכב על הרכב
,
ניתן להמיר את המומנט
הנחוץ לסיבוב
הגלגל כך שיפעל
בכיוון ההפוך על
הרכב בזמן התהפכות ולמנוע אותה
,
גם במצבים הנובעים מתמרון הרכב וגם במצבים הנובעים
מהשפעת כוחות חיצוניים
(
בנסיעה או בעמידה במקום
.)
רכיבים מכאניים
•
גלגל ריאקציה
.
•
תושבת מנוע
.
רכיבי מערכת הבקרה
•
בקר רכב ראשי
.
•
בקר בעל חיישן
IMU
.
•
בקר מהירות מנוע
.
•
מנוע
Brushless
. חשמלי
'ג"ה רכב
יוניור
"
' רכב הג
וניור הינו פלטפורמה
רובוטית
,
עליה
ניתן לפתח ולהוסיף מערכות
שיקנו לה יכולות נסיעה
אוטונומיים
.
הרכב מאגד בתוכו מס
'
פרויקטים
:
•
מערכת למניעת התהפכות
.
•
מערכת לזיהוי מכשולים
.
•
מעטפת ושלד
.
, כמו כן
על הפלטפורמה מתבסס פרויקט כלב השמירה
,
הכולל מערכות של
, טיפוס
זיהוי והרתעת פולשים
.
פיתוח
מערכת
למניעת
התהפכות
ברכב
רובוטי
, אוטונומי
בהתאם
לשינוי
זווית
הגלגול
הרכב של
בזמן
. אמת
המערכת
מתבססת
מימוש על
בקרת
בלימה
ופיתוח
מנגנון
ייחודי
להעברת
מומנט
ישירה
,
בהנעת
גלגל
ריאקציה
.