














 300-301 / 568
300-301 / 568

עודד חלוואני
,
מאור גבאי
"ד: מנחה
ר פטריק בר אבי
הנדסה מכנית
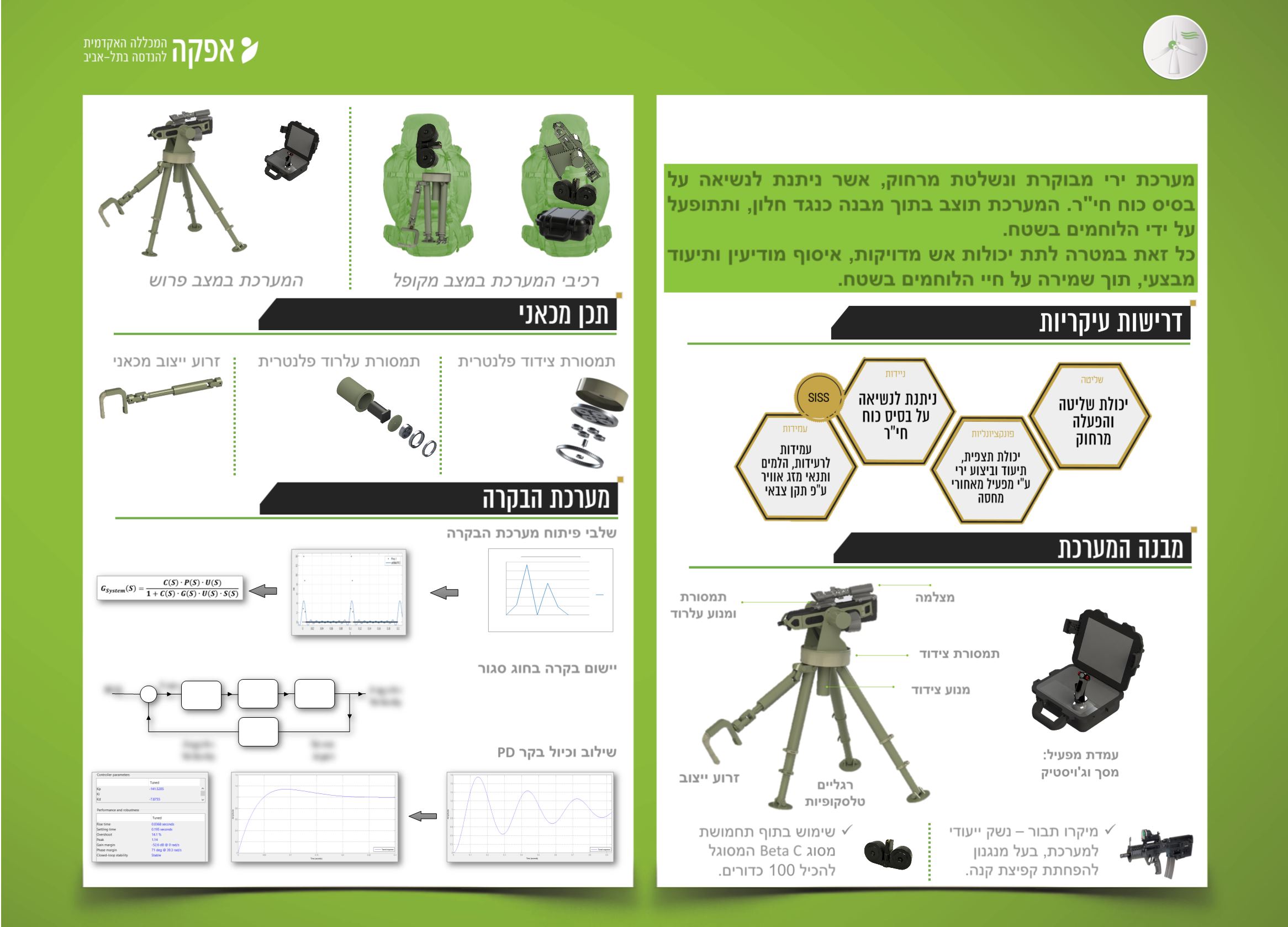
מערכת ירי מיוצבת לחי
ר"
מערכת
ירי
מבוקרת
ונשלטת
, מרחוק
אשר
ניתנת
לנשיאה
על
.ר"חי כוח בסיס
המערכת
בתוך תוצב
מבנה
כנגד
, חלון
ותתופעל
ידי על
הלוחמים
. בשטח
זאת כל
במטרה
לתת
יכולות
אש
, מדויקות
איסוף
מודיעין
ותיעוד
חיי על שמירה תוך , מבצעי
הלוחמים
. בשטח
שילוב וכיול בקר
PD
המערכת במצב פרוש
ביטוי תדר הירי כטור פורייה
יישום בקרה בחוג סגור
PD - C(S)
Pedestal -
P(S)
Error
Pitch
Servo -
S(S)
-
IMU
(Gyro)
U(S)
M(t)
Servo
input
Angular
Velocity
Angular
Velocity
מיקרו תבור
–
נשק ייעודי
למערכת
,
בעל מנגנון
להפחתת קפיצת קנה
.
הזרוע מתחברת
למשקוף בחדר
ומספקת יציבות
זרוע ייצוב מכאני
תמסורת צידוד פלנטרית תמסורת עלרוד פלנטרית
התמסורות
הפלנטריות
מספקת נצילות
גבוהה ומקטינה
Backlash
.
בתמסורת
פלנטרית ציר
העברה אחד
,
מה
שמאפשר נפח
מערכת
מינימלי
.
שלבי פיתוח מערכת הבקרה
רכיבי המערכת במצב מקופל
סגירת חוג מהירות על מנת
לקבל את זמן התגובה הקצר
. ביותר
איסוף נתוני
רתע
תבור - של מיקרו
0
10
20
30
40
50
60
0
2
4
6
8
F [Kg]
t [msec]
גרף רתע מיקרו
-
( תבור
5.56
)מ"מ
F(t)
עמדת מפעיל
:
' מסך וג
ויסטיק
בניית פונק
'
תמסורת של
המערכת
השקולה
מנוע צידוד
תמסורת
ומנוע עלרוד
זרוע ייצוב
רגליים
טלסקופיות
מצלמה
תמסורת צידוד
שימוש בתוף תחמושת
מסוג
Beta C
המסוגל
להכיל
100
. כדורים