














 268-269 / 568
268-269 / 568

אסף בליץ
,
מיטל בן דוד
: מנחה
מר צחי שוחט
הנדסה מכנית
כלב
שמירה רובוטי מבוסס
'ג"
וניור
"
דרישות עיקריות
:
•
יכולת טיפוס על גבי מדרגות
–
"עפ
י תקנון גובה מדרגה הינו
17
.מ"ס
•
יכולת זיהוי פולשים ממרחק של לפחות
3
. מטר
•
יכולת נטרול פולשים תוך המנעות מנזק בלתי הפיך
.
•
הגנה על
, הרכיבים
האלקטרוניקה והחיישנים ובידודם
,
תוך מתן
גישה נוחה
ליציאות
המחשב
והאנרגיה
.
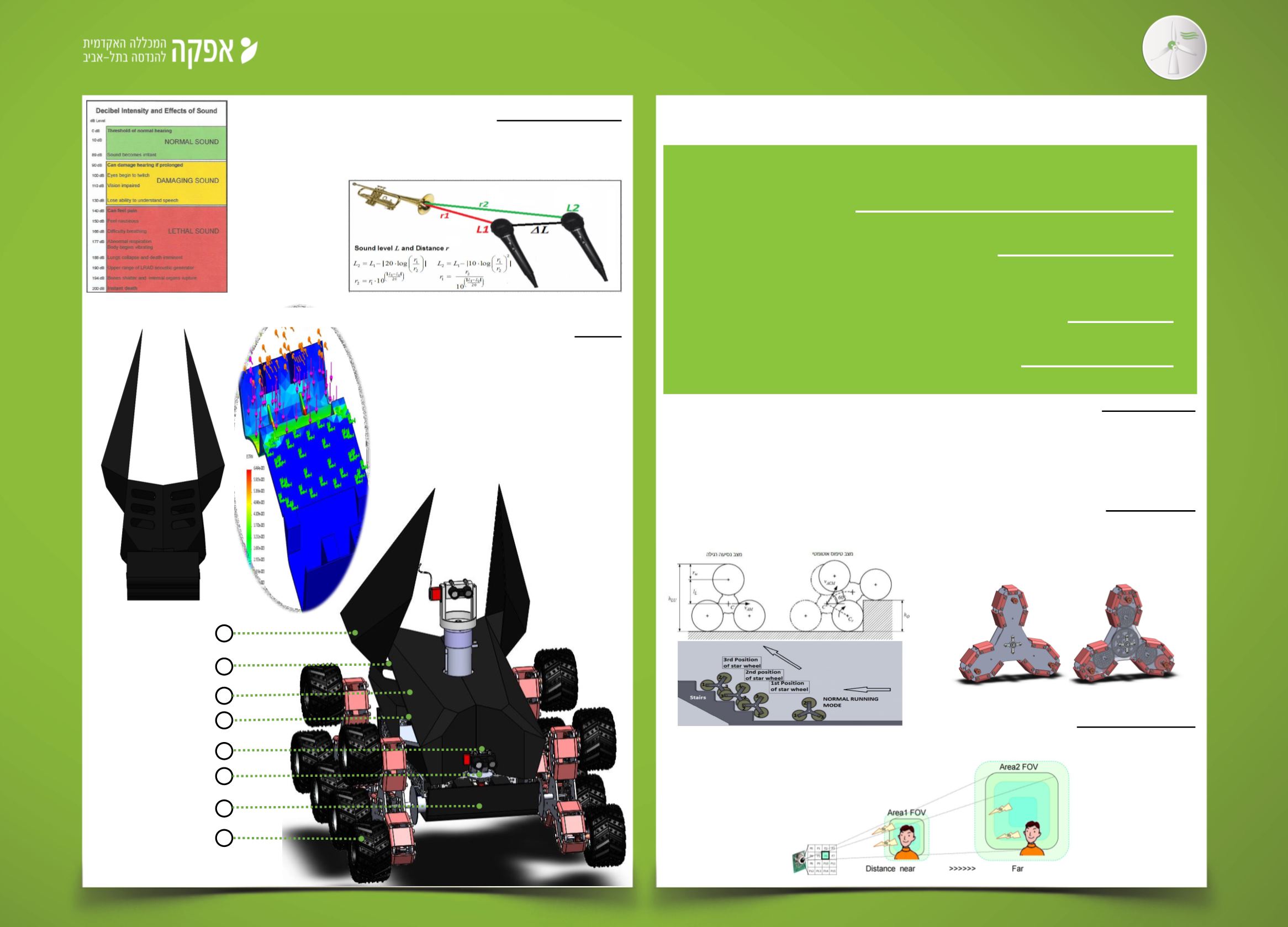
מערכת הטיפוס
:
מערכת
הטיפוס תוכננה
כמערכת מכנית טהורה
המקנה לרובוט
3
מצבי נסיעה
–
נסיעה
,
טיפוס ומצב
. ביניים
האופן בו המערכת
עוברת ממצב למצב הינו אוטומטי לחלוטין וקורה
בזמן
האינטראקציה בין
הגלגל
למכשול
עליו נוסע
.
מערכת זיהוי פולשים
:
מערכת זיהוי הפולשים פועלת באמצעות חיישן תרמי המסוגל לקרוא תמפרטורת משטח באמצעות
IR
.
חיישן זה סורק את סביבתו לפי מטריצה של
8
. ערוצים
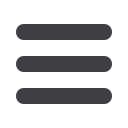
מערכת נטרול פולשים
:
מערכת הפועלת באמצעות רמקול המסוגל להפיק רעש בעוצמה של
-כ
150 dB
.
המערכת תוכננה כך שלא תהווה סכנה לחיי אדם או בעלת
נזק בלתי הפיך
,
תוך כדי התחשבות בירידת העוצמה ככל שגובר המרחק
.
: מעטפת
פיתוח מעטפת בעלת יכולות הרתעה באמצעות
מראה מאיים
,
" תאורה ו
כנפיים
"
הנפתחות בעת
זיהוי פולש וחושפות את המערכת הנטרול והשמע
.
המעטפת תוכננה בהתאם לדרישות שאר
המערכות תוך התחשבות במיקומם
,
בידודם
והגנתם של הרכיבים השונים
.
החומר הגלם ותכונותיו המכניות נבחנו ונבחרו
בהתאם
לתנאי הסביבה ודרישות הפרוייקט
.
פיתוח
מגוון
מערכות
עבור
כלב
שמירה
, רובוטי
מבוסס
על
פרויקט
'ג"
וניור
"
המוסב
לתחום
האבטחה
האזרחית
.
•
פיתוח
מעטפת בעלת יכולות הרתעה
גנריות
-
עמיד ואטום למים
ולשינויי
טמפרטורה וחזק בפני תקיפה
.
•
מערכת
נטרול
והרתעה
–
נועדה
למניעת
ניסיונות
חדירה
למתחם
ונטרול
י"ע פולשים
קול גלי
והרתעתם
באמצעות
" כנפיים " פתיחת
ותאורה
.
•
מערכת
טיפוס
–
המקנה
לרובוט
יכולת
עבירות
בתנאי
קשים שטח
ומדרגות
.
•
מערכת
זיהוי
פולשים
–
המקנה
לרובוט
יכולת
זיהוי
אדם בני
באמצעות
חיישנים
. תרמיים
1
3
5
6
" כנפי "
הרתעה
7
8
מעטפת
חיישן תרמי
מערכת זיהוי מכשולים
גחון -מגן
מערכת טיפוס
4
תאורת לד
(
פס מוסתר
)
2
בית המערכת נטרול
אנליזת חוזק למגן הגחון
מעטפת
צד אחורי