














 280-281 / 568
280-281 / 568

חנא מונייר
- ר בר "ד: מנחה
אבי פטריק
הנדסה מכנית
רובוט לשחרור בקבוקים
הדרישות העיקריות
•
המערכת תעבוד בצורה אוטונומית
.
•
חיסכון בכוח אדם בקו יצור
.
•
זיהוי והגעה למקום ההיתקעות באופן מהיר ומדויק
.
•
ביצוע תהליך החילוץ באופן יעיל וללא פגיעה בבקבוק
.
•
תחזוקה קלה ונוחה ובלאי נמוך ככול האפשר
•
מערכת בקרה מקיפה ונוחה
לשימוש
•
עיקרי הפתרון ההנדסי
•
מערכת אוטונומית לחלוטין
.
•
מערכת ממונעת ע
"
י מנוע
DC
במהירות
2
\ מטר
שניה כפי שהוגדר
בדרישות
.
•
המערכת מבוקרת ע
"
י בקר חשמלי ראשי מסוג
UNITRONICS
ובאה
בממשק עם בקר מסוע האוויר בעזרת
Interlock
.
•
המערכת מזהה את מקום ההיתקעות בעזרת חיישן אולטראסוני המותקן
על גבי המניפולטור
.
•
ביצוע פעולת חילוץ הבקבוק התקוע ושחרור הפקק שנוצר בעזרת זרוע
מכנית מבוקרת
.
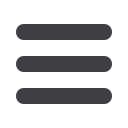
מטרת
פרויקט
תכנון היא זה
מערכת
אוטונומית
לשחרור
בקבוקי
פלסטיק
אשר
נתקעים
במסוע
אוויר
במפעלי
ייצור
משקאות
. קלים
בפרויקט
זה
פותח
מניפולטור
על שרץ
מסילה
לאורך
מסוע
האוויר
ומחלץ
בקבוקים
תקועים
בעזרת
זרוע
מכנית
ומערכת
בקרה
שמגדירה
את
המיקום
. במדויק
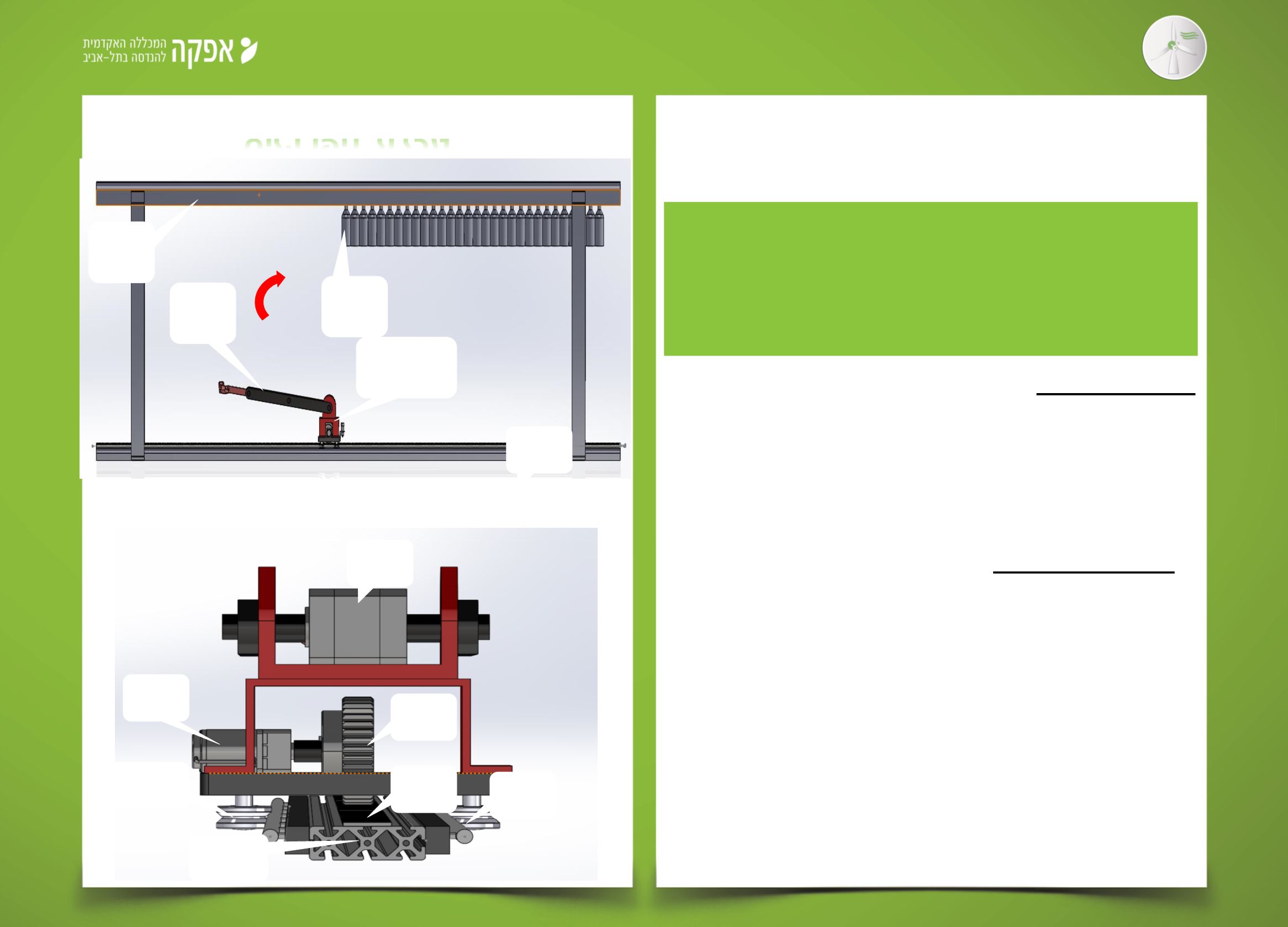
מכלול הפרויקט
זרוע
מכנית
מסוע
אוויר
בקבוק
תקוע
מניפולטור
מסילה
מנוע
מנוע
ש"גג
גלגלי
GROOVE
פרופיל
אלומיניום
רצועה
משוננת
מסילה