














 264-265 / 568
264-265 / 568

טל צאושו
,
רודריגו מאיו
"ד: מנחה
ר עמוס מזרח
הנדסה מכנית
ראש רובוטי לקטיף סלקטיבי לתות שדה
דרישות עיקריות
:
•
פיתוח מערכת אוטונומית לקטיף תותים ללא פגיעה בפרי
ובשיח
•
קטיף יעיל של תות בשל לפי הגדרת צבעו וצורתו של התות
.
•
הוזלת עלויות העובדים
פרויקט ראש רובוטי
לקטיף תות שדה
הוא פרויקט הבא לתת
פתרון לתחום מגדלי התותים בארץ ובעולם
.
כיום בעולם
משווקים תוצרת של מעל מיליון טון בשנה של תות שדה לפיכך
,
מכונה לקטיף אוטונומי הינה בעלת פוטנציאל לשימוש באזורי
גידול תות שדה רבים בעולם
,
ולא רק בשוק הביתי הישראלי
.
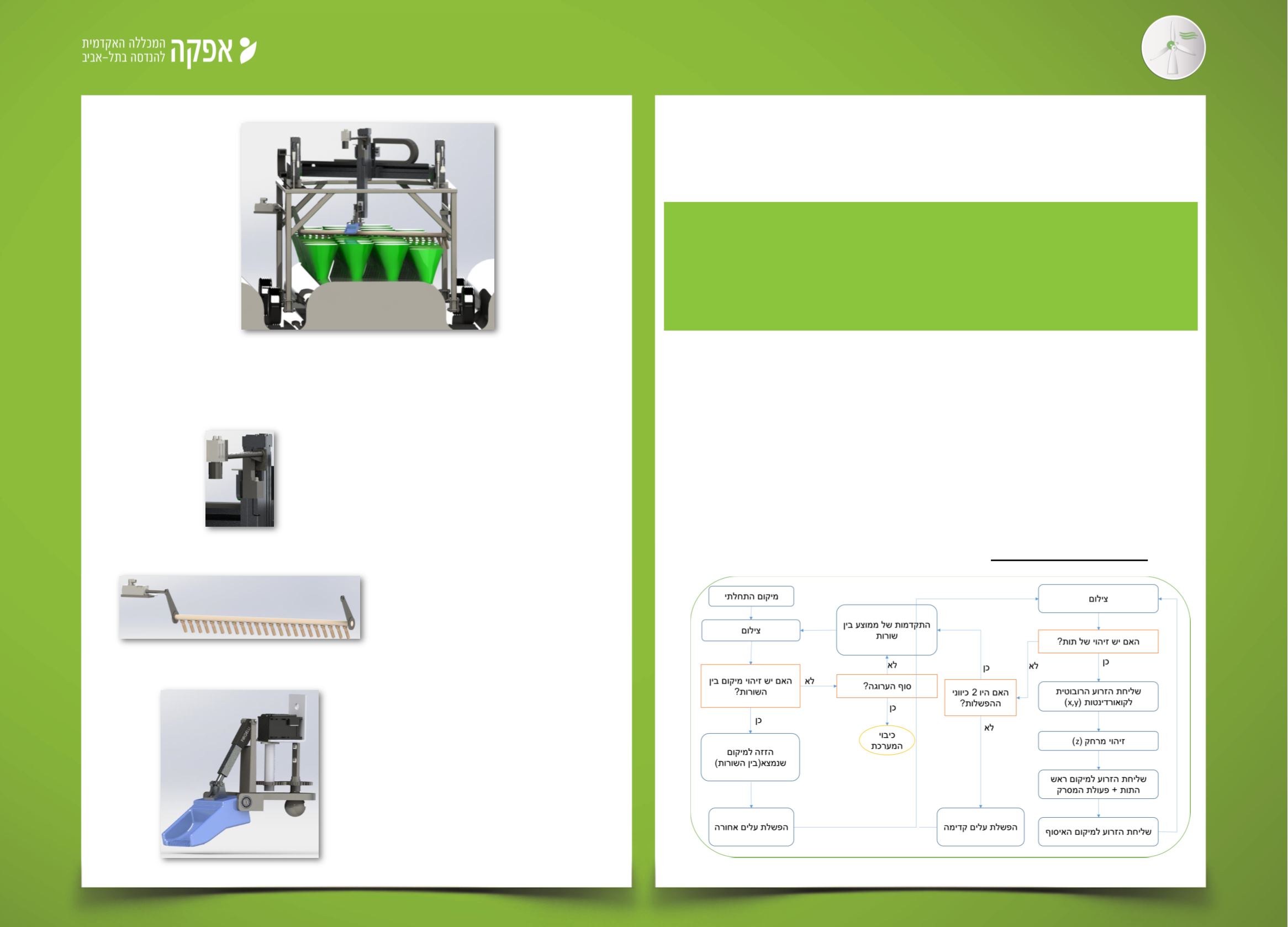
תהליך הקטיף ושלבי עבודה
:
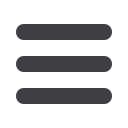
המערכת המוצגת בפרויקט מורכבת משלושה מכלולים עיקריים שיחד משיגים את היכולת
לקטוף את התות בצורה יעילה שאינה פוגעת בטיב הפרי ובערוגה
:
•
מערכת הזיהוי פועלת בשלב ראשון לזיהוי מיקום
השיח לאורך הערוגה ובשלב שני לזיהוי הפרי הבשל
-על
פי צבעו וצורתו
.
•
מערכת ההפשלה המורכבת ממוט
ממונע שמטרתו להטות את העלים
על מנת לחשוף את הפירות
.
•
מערכת
קרטזית
מניע את ראש הקטיף למיקום
מדויק שנשלח
ממערכת
. הבקרה
לאחר ההגעה
למיקום
,
כף הקטיף מבצעת את פעולת
. הקטיפה
תהליך זה נעשה ע
"
י בוכנה
המרימה את
הכף כך
שבין שיניה
נמצא גבעול
. התות
במקביל
נעשה
חיתוך של הגבעול
"ע
י להב המוצמדת
לצידו
התחתון של
. הכף