














 236-237 / 568
236-237 / 568

ניב פרנקה
,
עומר ויטמן
"ד: מנחה
ר בנימין
אברמוב
הנדסת חשמל
רובוט אוטונומי דמוי אדם בתפקיד השוער למשחק
כדורגל
רובוט תכנון
שוער
עצמאי
על בקרה
תנועות
הרובוט
ומיקומו
•
תכנון
פעולות
. הרובוט
•
בקרת
תנועות
הרובוט
בהתאם
לתוצרי
ניתוח
. תמונה
זיהוי
תמונה
•
שימוש תוך
, במצלמה
זיהוי
פרמטרים
שונים
. במגרש
•
חישוב
פרטים
נוספים
,
מיקום
כיוון
ומהירות
וכן הכדור
מיקום
וכיוון
. הרובוט
פרויקט
מודולרי
בתכנון
וביישום
שיכול
להשתלב
בתוך
קבוצה
של
רובוטים
אחרים
להרכבת
קבוצת
כדורגל
. מלאה
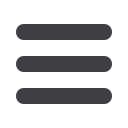
Get up
face up
Simplified
Decision
making
process
Yes
Did Robot
fell down?
Facing up or
Down?
Get up
face
down
Is Robot in
Gate?
Is Robot
facing Ball?
Is Ball in
stopping
distance?
Stop the
Ball
Get Ball
direction
Make a step in given
direction
Search
for
Ball
Face
down
Face
up
Update Picture Data
Is Ball
identified?
Get Gate
direction
Yes
Yes
Yes
Yes
No
No
No
No
No
ניב פרנקה
,
עומר ויטמן
"ד: מנחה
ר בנימין
אברמוב
חשמל
י ו
ו ו ו ונו י וי
ו
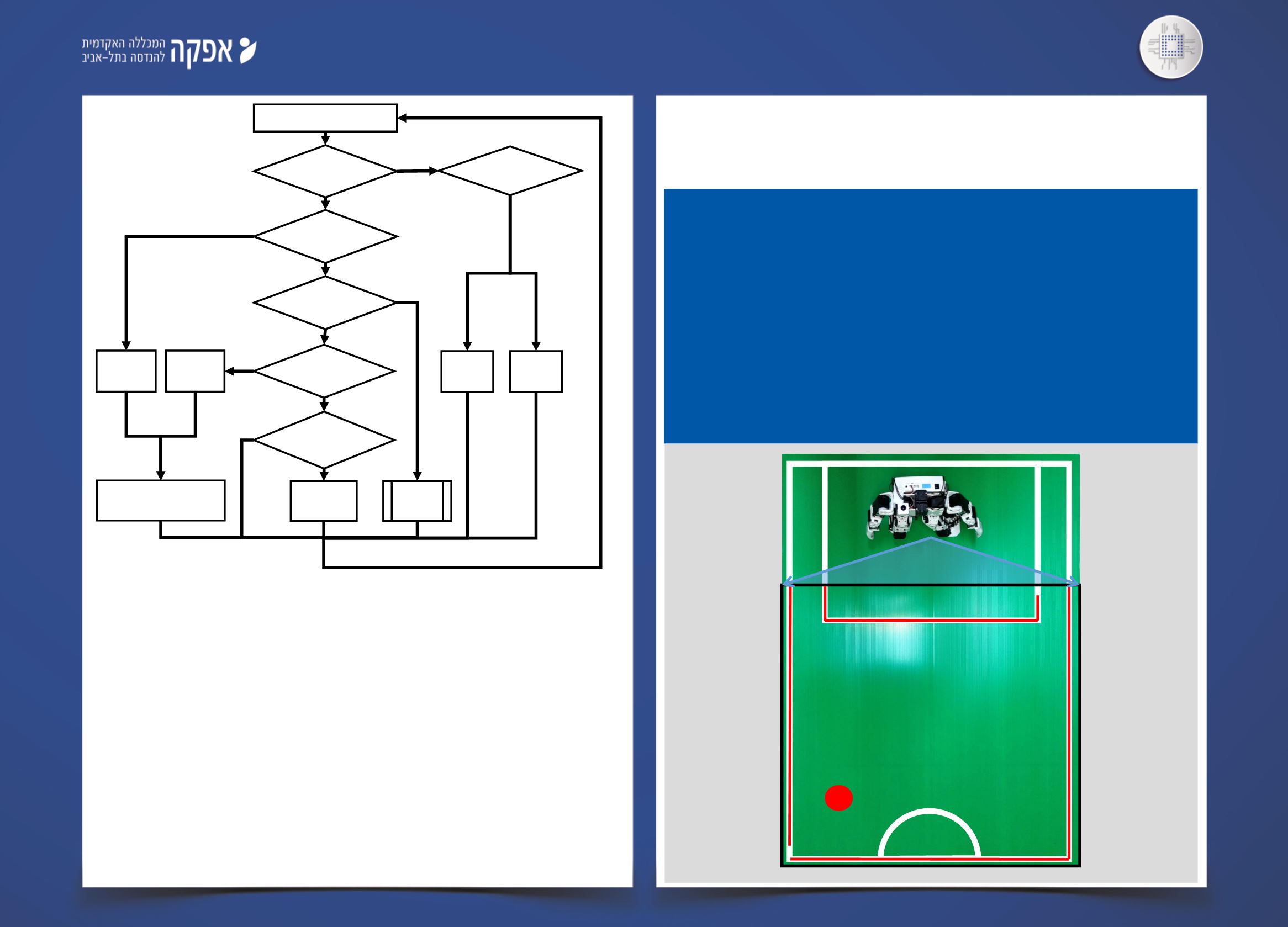
•
לצורך
זיהוי
גבולות
המגרש
נעזר
: בפקודה
HoughLines()
מהפקודה
נקבל
זווית
וגודל
וקטור
ביחס
לפינה
שמאלית
עליונה
של
התמונה
כאשר
הקו
הנוצר
מנתונים
אלו
לו מאונך
שזוהה
. בתמונה
•
לצורך
זיהוי
הכדור
נעזר
: בפקודה
cvHoughCircles()
מהפקודה
נקבל
מיקום את
הכדור
X,Y
ורדיוס
R
ביחס
לתמונה