














 244-245 / 568
244-245 / 568

אלכס איגנטנקו
: מנחה
מר זוהר דביר
הנדסת חשמל
העברת נתונים מלוח מחוונים של רכב רובוטי לניהוג
מרחוק
מהות
: הפרויקט
פרויקט
זה
מהווה
חלק
מפרויקט
רחב
שמטרתו
להסב
קיים רכב
לרכב
. רובוטי
הפרויקט
הוא
הפרויקט
טיפוס אב מהווה
להוכחת
התכנות
מערכת של
האוספת
את
המידע
לוח גבי על המוצג
המחוונים
ומשדר
אותו
למשתמש
בשידור
RF
.
הדרישות העיקריות
המערכת תורכב משני חלקים כאשר חלק אחד ידמה את התקשורת הקווית עם הלוח ברכב והחלק
השני ידמה את התקשורת האלחוטית עם הלוח בעמדת השליטה מרחוק
.
המערכת תתקשר עם לוח המחוונים של הרכב בעזרת פרוטוקול ה
CAN-bus
.
המערכת תשדר את המידע המתקבל בתקשורת אלחוטית מבוססת
RF
.
המערכת תתריע למרכז הבקרה מפני מצבים קיצוניים של הפרמטרים המוצגים על גבי לוח המחוונים
כגון מהירות או טמפרטורת מנוע
.
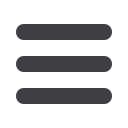
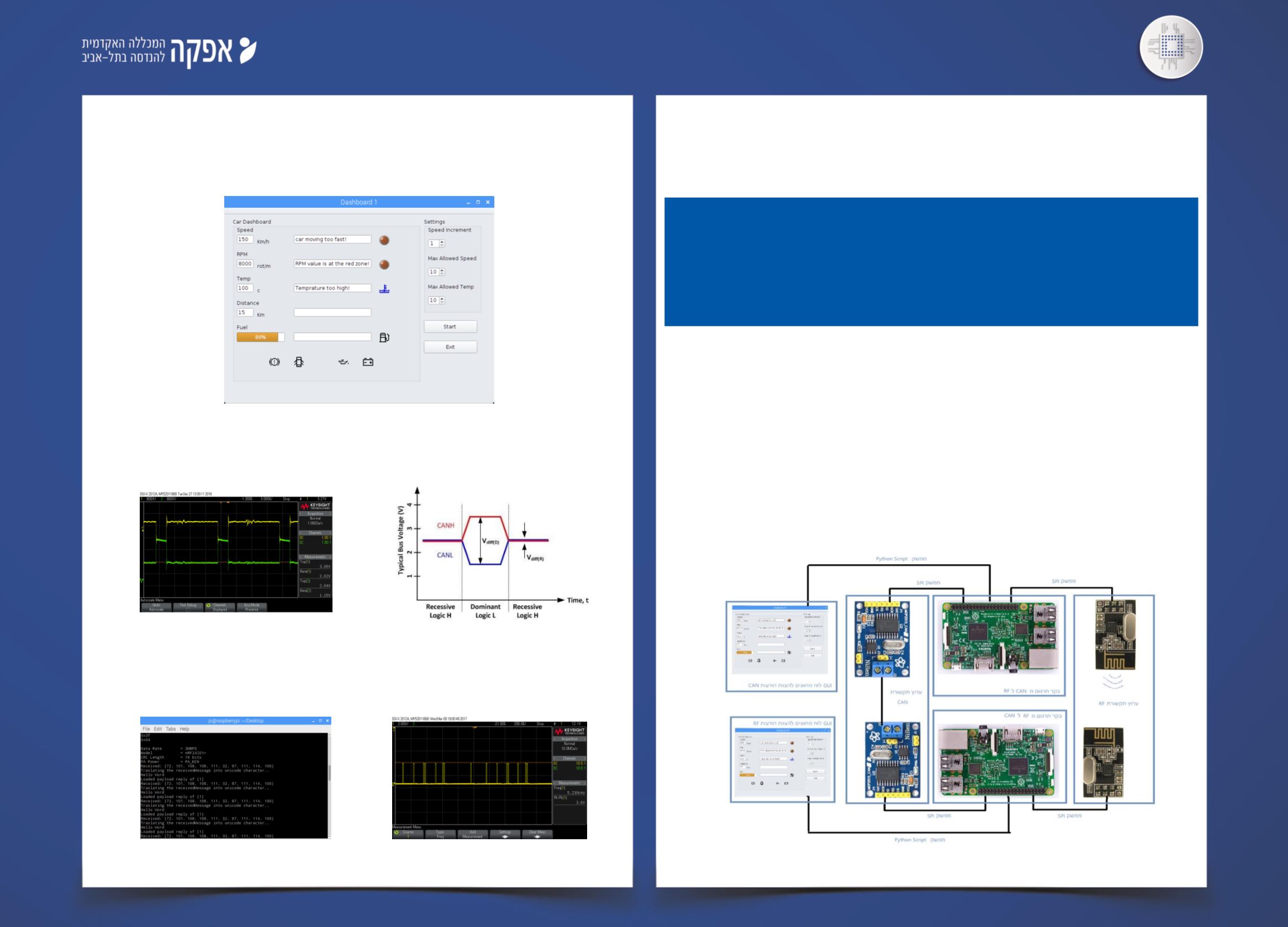
תאור סכמטי של המערכת
ממשק משתמש
ממשק משתמש גרפי המדמה למשתמש את לוח המחוונים של הרכב ומציג את המידע
המועבר בין
שתי נקודות הקצה למשתמש
תקשורת
CAN bus
פרוטוקול טורי המעביר מידע באופן דיפרנציאלי וממומש בעזרת שני חוטים המהווים זוג שזור
.
המחשת תקשורת
CAN
הנבדקה על גבי מחשב
Raspberry Pie 3
לעומת התאוריה
.
שליחת מידע ב
RF
מה
Raspberry Pi 3
העברת הודעות בין שני מחשבי
Raspberry Pie 3
בתקשורת
RF
הממומשת בעזרת מודול
nRF24L
.
המחשת התהליך הקליטה על גבי מסך ה
terminal
וצורת הגלים באוסילוסקופ
.