














 246-247 / 568
246-247 / 568

רומן פינחסוב
: מנחה
מר זוהר דביר
הנדסת חשמל
שרת תקשורת מקומי לרכב רובוטי אוטונומי
מהות
: הפרויקט
מדובר
בפרויקט
ייעודי
המהווה
חלק
מפרויקט
רחב
שתכליתו
היא
הסבת
קיים רכב
לרכב
. רובוטי
הפרויקט
הוא
למעשה
טיפוס אב
להוכחת
התכנות
שרת של
התקשורת
שעונה
לדרישות
.
הדרישות העיקריות
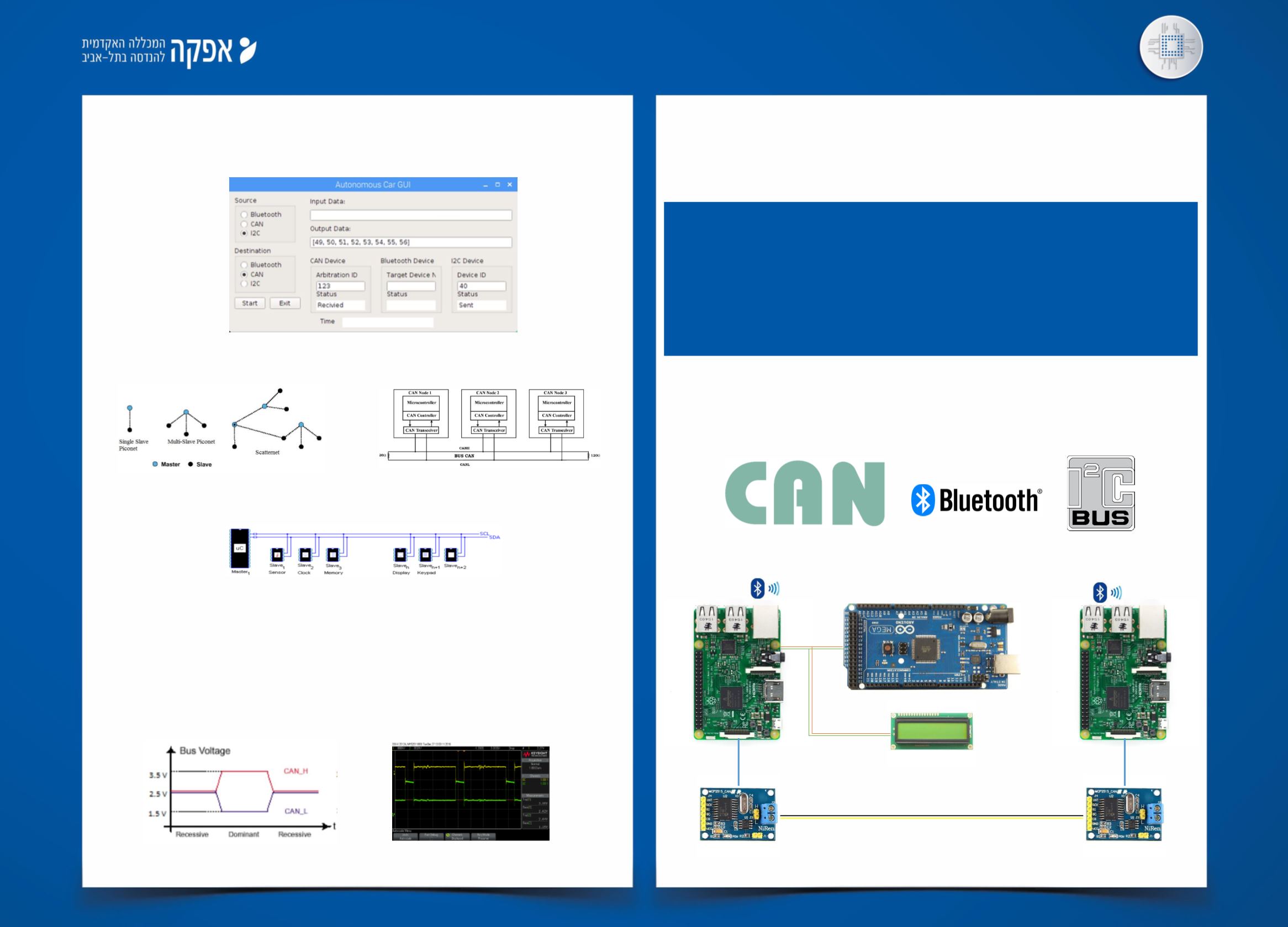
השרת ידע להמיר ולנתב מידע בין שלושה פרוטוקולי תקשורת שונים
.
כשרת תקשורת המיועד לרכב ההמרה תעשה מ
CAN
ל
I2C
ומאותו
CAN
ל
Bluetooth
.
הפרוטוקולים הם
CAN bus, Bluetooth
ו
I2C
.
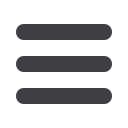
מבנה האב טיפוס ברמה הסכמתית
ממשק משתמש
ממשק משתמש גראפי
,
GUI
,
להצגת המידע במועבר בכל ערוץ תקשורת ומומר לאחד אחר
.
הממשק מותקן על גבי כל אחד מה
Raspberry Pi 3
במערכת
.
מבנה רשת
קצת על
CAN bus
המידע בקו
CAN
מועבר על גבי כבל דו גידי
,
בצורה טורית ודיפרנציאלית
.
להלן המחשה של העברת הודעה בקו לעומת תאוריה
CAN bus
I2C
Arduino
RPi3
RPi3
CAN transceiver
CAN transceiver
LCD
מבנה רשת
I2C–
רשת קווית עם קו שעון וקו
. מידע
בתצורת
Master
אחד והרבה
Slaves
.
מבנה רשת
Bluetooth
–
רשת אלחוטית
בתצורת
Piconet
ו
Scatternet
.
מבנה רשת
CAN –
רשת קווית עם מספר רב
של התקנים במקביל בשיטת
AND
. לוגי