














 226-227 / 568
226-227 / 568

דותן
פרוינדליך
: מנחה
זוהר דביר
הנדסת חשמל
לכידת תנועה באמצעות וידאו להפעלת רובוט
Meccanoid G15 KS
פרויקט
זה
עוסק
בפיתוח
טיפוס אב
להוכחת
היתכנות
הפעלת של
הרובוט
Meccanoid G15 KS
ידי על
תנועות
גוף
ללא
שימוש
במכשיר
, חכם
אשר
כרטיס על מבוסס
פיתוח
מסוג
Raspberry Pi 3
-ו
Raspberry Pi Camera Module
וממומש
ידי על
אלגוריתם
לראייה
ממוחשבת
ותקשורת
אלחוטית
(
Bluetooth
אב בין )
הטיפוס
למערכת
הבקרה
( הרובוט של
Meccabrain
).
תחומי הפרויקט
עיבוד תמונה ווידאו
,
מערכות משובצות מחשב
,
תקשורת אלחוטית
.
יעדי הפרויקט
תכנון של אב טיפוס כיחידה עצמאית הכוללת את כרטיס הפיתוח
,
המצלמה ורכיב ה
-
Bluetooth
לתקשורת אלחוטית על מנת לאפשר לרובוט לחקות את תנועת הגוף המתבצעת
.
יעדים אלו כוללים את השלבים הבאים
:
•
יכולת הרובוט לשאת את רכיבי אב הטיפוס
.
•
קליטת תמונת תנועת הגוף מהמצלמה
.
•
ביצוע עיבוד תמונה ווידאו לצורך זיהוי תנועת הגוף
.
•
שידור התנועה באופן אלחוטי
(
Bluetooth
)
אל מערכת הבקרה של הרובוט על מנת שהרובוט יחקה
את תנועת הגוף שבוצעה
.
דרישות הפרויקט
•
בניית אב טיפוס להוכחת היתכנות של הפעלת הרובוט על ידי תנועות גוף
.
•
זיהוי
8
תנועות גוף שהוגדרו מראש
.
•
חיקוי תנועות הגוף על ידי הרובוט
.
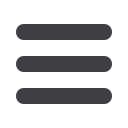
האלגוריתם לראייה
ממוחשבת
האלגוריתם אשר יושם באמצעות ספריית עיבוד התמונה
OpenCV
,
מקבל את תמונת האדם המבצע
את תנועת הגוף מהמצלמה הממוקמת בחלקו הקדמי של הרובוט
.
האלגוריתם מזהה את פניו של האדם העומד מול המצלמה
,
מחפש ומסמן את
מיקום הכתפיים
ביחס
, לפנים
מחפש את מרכז המסה של הידיים
ומחשב את הזויות הנוצרות על ידי תנועת היד
,
בטווח מקו
הכתפיים המוגדר כאפס ועד לנקודה בה הידיים צמודות לגוף המוגדרת כ
-
90
°
על מנת לזהות את
-מ אחת
8
התנועות שהוגדרו
.
מבנה עקרוני של הפרויקט
תרשים זרימה של הפרויקט
תוצרי
הפרויקט
•
אב טיפוס מתפקד שיתממשק עם מערכת הבקרה של
הרובוט באופן אלחוטי
.
•
אלגוריתם לראייה ממוחשבת שיאפשר את זיהוי תנועות הגוף שיקלטו על ידי המצלמה
.
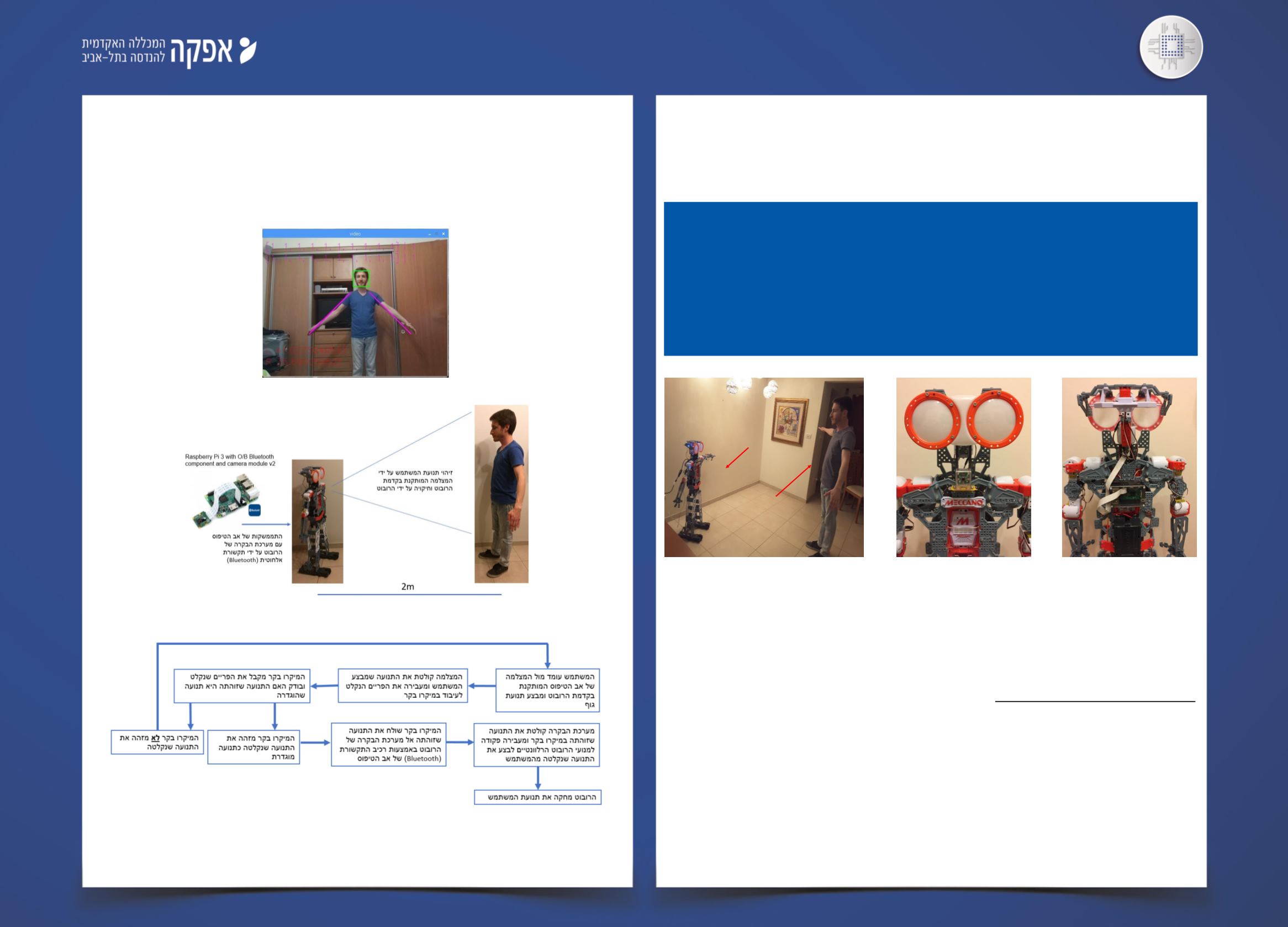
תנועת הגוף של המשתמש
חיקוי תנועת הגוף של המשתמש על
ידי הרובוט