














 30-31 / 568
30-31 / 568

גיא תובל
"ד: מנחה
ר מריה
ר דוד "ד, ב' ארטישצ
פייטלסון
הנדסת תוכנה
מערכת הנחיה לרכב אוטונומי
המערכת תחשב מסלול אופטימלי ראשוני תוך
10
דקות לכל היותר
.
מרגע קבלת שינויים בסביבה בה
מנווט הרכב
,
המערכת תשלח לרכב פקודות
נהיגה
תוך
3600
מילישניות לכל היותר
.
המערכת תנווט
את הרכב במסלול שמצאה
–
המסלול הקצר ביותר
.
במידה והמערכת לא מצאה מסלול
,
המערכת
תדרוש מהרכב לעצור
.
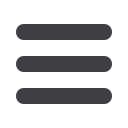
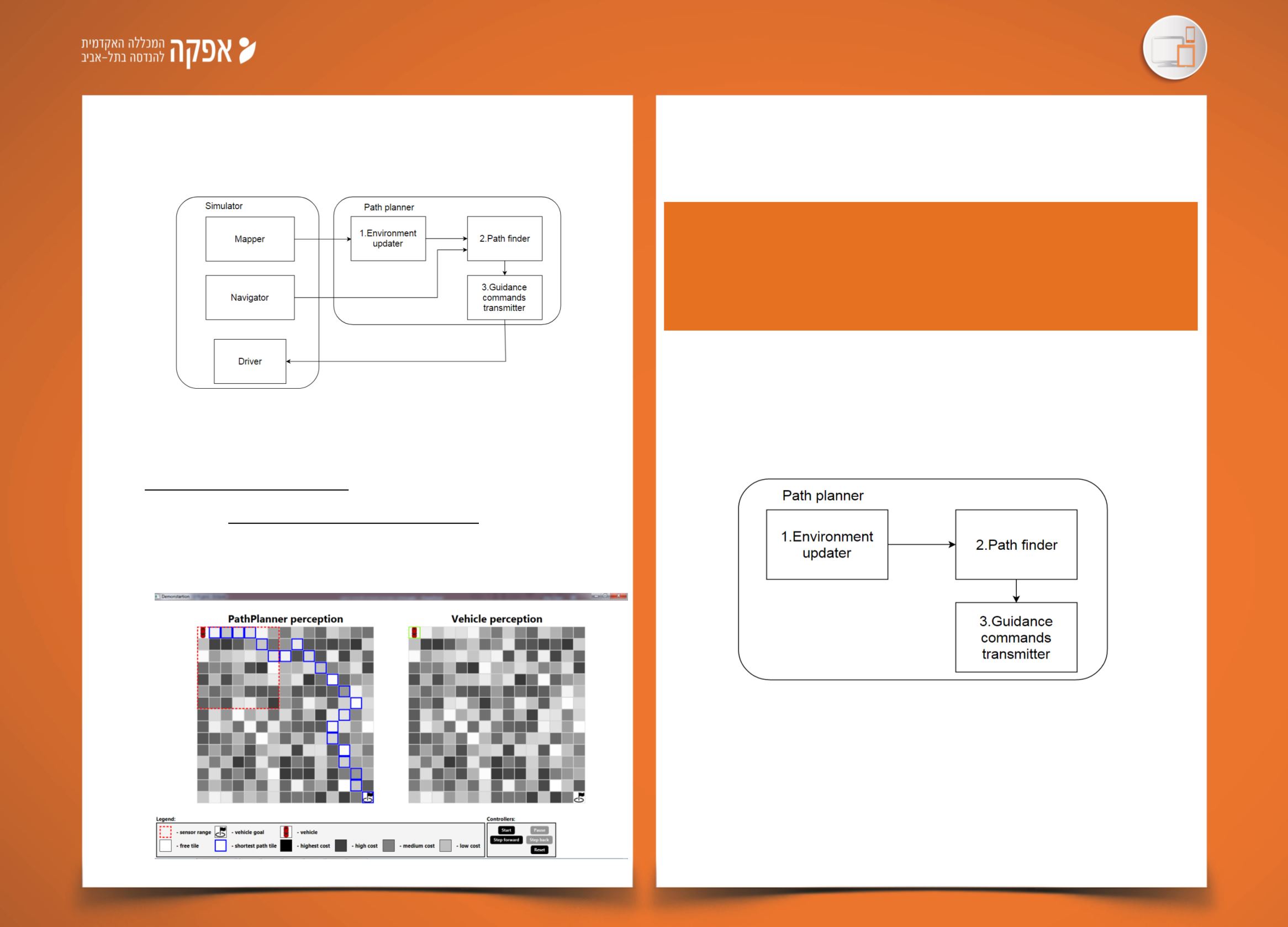
המערכת מחולקת ל
-3
, מודולים
כפי שניתן לראות בדיאגרמת הבלוקים שלהלן
:
מודול
Environment updater
-
מקבל את המפה הראשונית של סביבה הניווט ומעדכן אותה בזמן
אמת כתוצאה מעדכונים שמגיעים אליו
.
מודול
Path finder
-
מקבל את המיקום הנוכחי של הרכב
ומחפש מסלול אופטימלי אל היעד תוך
שימוש במידע הדרוש ממודול
Environment updater
.
מודול
Guidance commands transmitter
-
ניעזר במיקום הנוכחי של הרכב ובמיקום הבא בו אמור
להימצא הרכב כדי לייצר פקודת ניווט
.
פקודת הניווט שתיווצר תשלח אל הרכב
.
מאחר ולא קיימות מערכות חיצוניות להעברת המפה הראשונית למערכת המוצעת
,
להעברת עדכונים
למערכת המוצעת ולהעברת מיקום הרכב למערכת המוצעת
,
פותח סימולטור
.
הסימולטור אינו חלק
מתוצרי הפרויקט אך נועד לדמות את הפונקציונליות של המערכות המתקשרות עם המערכת המוצעת
ואת התקשורת ביניהן למערכת המוצעת
.
היחס בין המערכת המוצעת
(
PathPlanner
)
לסימולטור
(
Simulator
)
מתואר בדיאגרמה הבאה
:
Mapper
-
אחראי על שליחת המפה הראשונית ועדכונים בסביבת הניווט בזמן אמת
.
Navigator
-
אחראי על שליחת מיקום הרכב
.
Driver
-
אחראי על הנעת הרכב בהתאם לפקודות הניווט המתקבלות
.
בבדיקות שהתבצעו בשימוש בסימולטור המערכת המוצעת עמדה בדרישותיה העיקריות
:
•
חישוב מסלול ראשוני תוך
10
דקות לכל היותר
–
החישוב הראשוני לקח דקה לכל היותר
.
•
מרגע קבלת שינויים בסביבה בה מנווט הרכב
,
המערכת תשלח לרכב פקודות
נהיגה
תוך
3600
מילישניות לכל היותר
–
הפקודות נשלחו תוך
300
מילישניות לכל היותר
.
במטרה להמחיש את פעילות המערכת
,
פותחה הדמיה של תנועת הרכב בעזרת המערכת
.
ההדמיה
מציגה את נקודת המבט של הרכב על סביבת הניווט ושל המערכת על סביבת הניווט
,
כפי שניתן
לראות בתמונה הבאה
:
מחיר של אריח
(
tile cost
)
מייצג את הקושי להגיע אליו מהאריחים הסמוכים לו
.
מטרת
הפרויקט
היא
פיתוח
מערכת
הנחיה
לרכב
. אוטונומי
המערכת
מנווטת
יעדו אל הרכב את
דרך
המסלול
הקצר
, ביותר
במידה
וקיים
. כזה מסלול
במידה
ולא
קיים
, כזה מסלול
המערכת
תדרוש
מהרכב
. לעצור
כתוצאה
משינויים
בסביבה
,נע הרכב בה
המערכת
מחשבת
את מחדש
המסלול
הקצר
. היעד אל ביותר