














 28-29 / 568
28-29 / 568

Rotor-Rain
Application for agricultural spraying copter
The main requirements of the project:
Gathering weather information, analyzing the data and representing the conclusion
to the user.
Showing telemetry data including copter location on the screen of the tablet.
Plotting waypoints based on user input and sending them to the copter.
The application architecture have 4 main layers:
GUI layer
Logic layer
API layer
Network layer
Key features :
Intuitive
and
simple
to understanding design, with material design components.
Based only on
open source
hardware and software.
Ability to connect to
multiple platforms
, which use Mav-Link protocol and
Arducopter software.
Low cost
of development.
Advance
User experience.
Seiran Janinyan
Advisor: Dr. Itzhak Aviv
Software Engineering
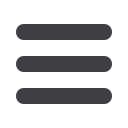
After arming and pressing the “Takeoff”
button The copter will follow the path
provided from the map and spray the field
Innovation :
Weather analysis -
system which represent the data to the user and suggesting if
it safe to perform the mission. Bad, windy weather can cause to a copter crash.
Advance user interface –
development done using material design components
and some of it concepts.
Data representation –
advance graphical and alphanumeric representation.
Advance User eXperience –
Information represented to the user only when its
needed (on user demand) or in case of warning. User receive feedback from the
application by vibrations by graphical or by vocal accompany.
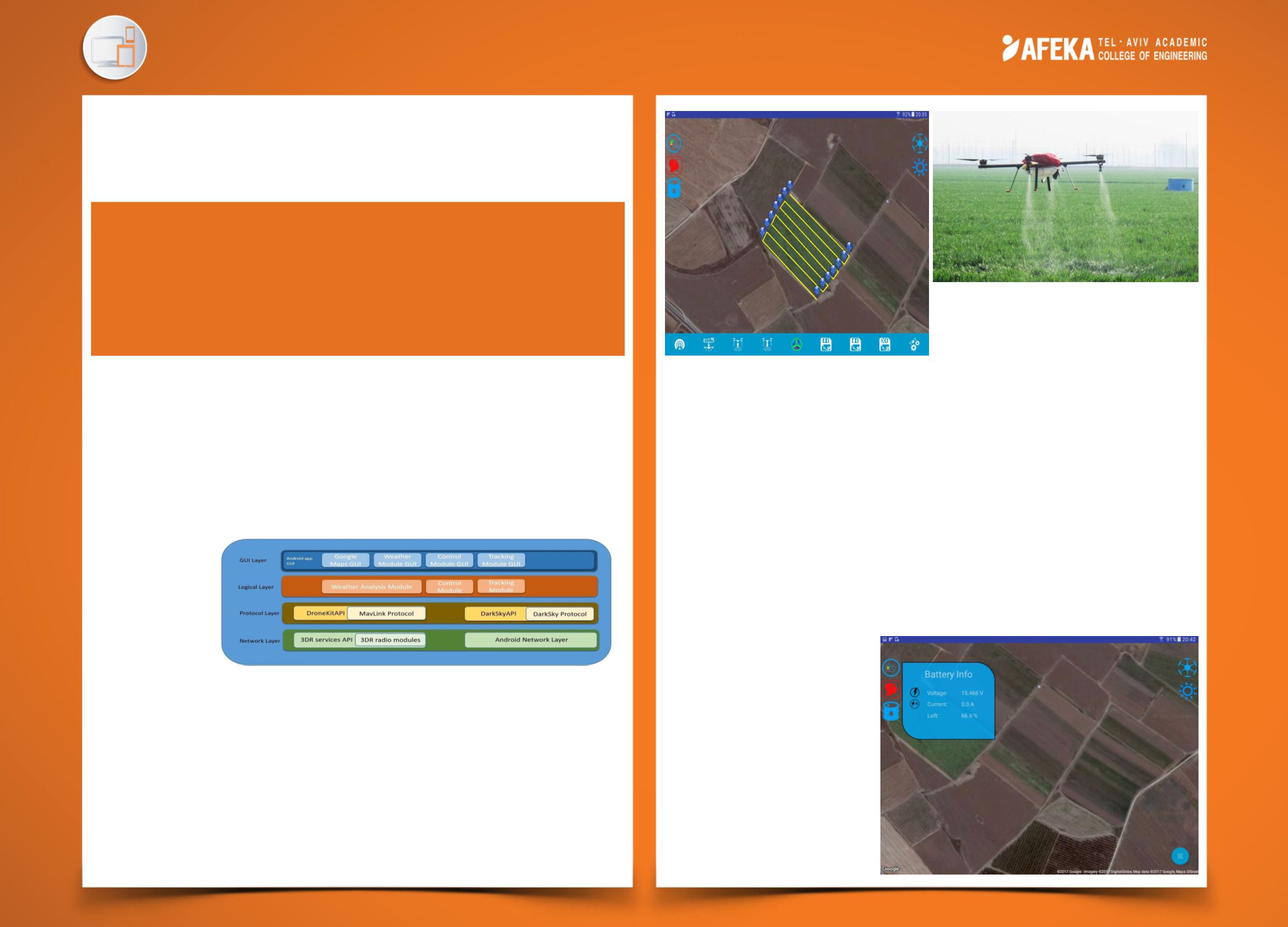
The picture on the right describes
battery data representation.
The data update frequency is 2Hz
and it is cannot be changed.
In this example the GPS icon is
red because there is no GPS
satellites acquired. The icon will
Change to yellow or red upon
GPS satellites acquiring.
Intuitive application, for plotting spraying paths and
sending them to the copter, which will, based on
weather analysis made by the application, perform
the “spraying mission” fully autonomously. During
the copter flight, representing to the user telemetry
information including copter position on the map.