














 214-215 / 568
214-215 / 568

אוראל חלפון
: מנחה
מר זהר דביר
הנדסת חשמל
פיתוח יחידת שליטה ובקרה לרובוט
מסוג
Meccanoid G15 KS
הפרויקט עוסק בפיתוח מערכת להפעלת גוף רובוט מסוג
Meccanoid G15 KS
,
אשר מחליפה את הבקר הקיים
ומתממשקת למערכת הכללית של הרובוט
.
המערכת כוללת בסיס של תנועות עבור כל מנוע מגוף הרובוט
.
הפרויקט כולל אפליקציית
Android
בתקשורת
Bluetooth
.
מטרת הפרויקט הינה אב טיפוס להוכחת היתכנות למערכת שליטה ובקרה מבוססת חומרה
למתן פקודות תנועתיות לרובוט
.
, בנוסף
חשוב לדאוג להפיכת התוצר לחלק אינטגרלי של
הרובוט תוך ייצוב מערכתי
.
מטרה נוספת
(
אופציונאלית
)
היא פיתוח אפליקציית מובייל למכשירי
Android
ליישום חלק
מהמערכת באמצעות תקשורת
Bluetooth
.
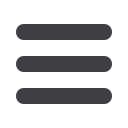
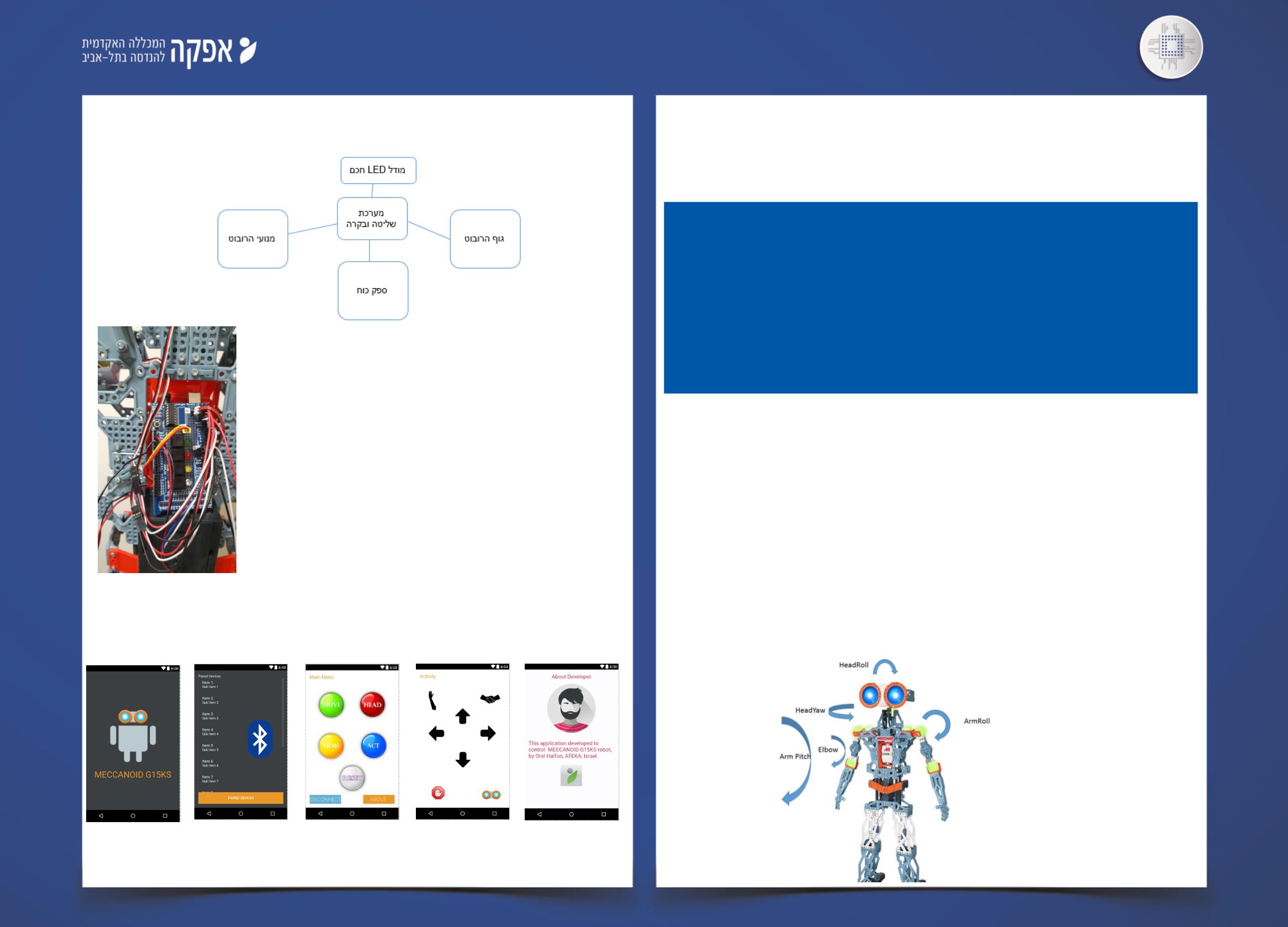
המערכת כוללת בסיס של תנועות פשוטות עבור כל מנוע בפלג הגוף העליון של הרובוט
(8
מנועי סרבו קיימים
)
וכן הנעה של פלג הגוף התחתון שכולל
2
גלגלים
עם (
2
מנועי
DC
.)
, בנוסף
מתבצע שימוש במודל
LED
חכם שממוקם בראש הרובוט לצורך ציון מצב
.
הבקר שנבחר מחליף את הבקר הקיים ומחובר באמצעות התקשורת הקווית לכל עשרת
המנועים הקיימים בגוף הרובוט
.
להלן תרשים הארכיטקטורה הכללי של הפרויקט
-
תוצרי הפרויקט
:
.1
בקר מתוכנת
Arduino MEGA
המהווה מערכת שליטה
על הרובוט
.
המערכת ממוקמת בגב הרובוט וניתנת לשליטה
"ע
י ממשק משתמש
(
לחצנים
עם )
4
מצבים שונים של תנועה
.
המערכת מקבלת אספקת מתח מספק הכוח המקורי
כך ,
שהרובוט נשאר עצמאי ולא נדרשים חיבורים חיצוניים
.
2 .
אפליקציית
Android
ייעודית למכשירי מובייל אשר מתחברת
למערכת מבוססת החומרה באמצעות תקשורת
Bluetooth
עם
מודל
BT
בסיסי שמחובר לאחד מערוצי התקשורת של הבקר
.
בדומה לאפשרויות השליטה דרך הלחצנים
,
גם באפליקציה
ישנם ארבעה מצבים שונים של תנועה
.
באפליקציה קיים גם עמוד שמסביר בקצרה על ייעודה ועל המפתח
,
כולל קישור לאתר
הרשמי של מכללת אפקה
.
האפליקציה עוצבה באופן עצמאי באמצעות תוכנת
photoshop
.