














 136-137 / 568
136-137 / 568

דביר לוגי
: מנחה
מר זוהר דביר
הנדסת חשמל
מערכת לזיהוי נקודות בקרה
-
' חלק א
מהות
: הפרויקט
הפרויקט
לוקח
חלק
בפרויקט
יפותח בו רחב
רכב
האמר
צבאי
. אוטונומי
במסגרת
הוכחת
היכולת
פותחה
מערכת
לזיהוי
נקודות
בקרה
המייצגות
מיקומים
מרחביים
. שונים
נקודות
הבקרה
תפוזרנה
לאורך
המסלול
ומעבר
בקרבתן
יקנה
לרכב
האוטונומי
אינדיקציה
נוספת
לגבי
התקדמותו
לאורך
. המסלול
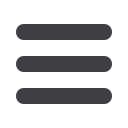
ממשק משתמש
:
התוכנה מאפשרת להציג את הפלט של מעגל הבקרה באופן גרפי על גבי מפה במחשב סטנדרטי
,
וניתן לעשות בה שימוש לצורכי בדיקות ותחקור המערכת
.
יכולת בחירת מפה עבור אזור נבחר
.
הצגת נתוני
GPS
ונתוני נקודות בקרה בזמן
. אמת -
יכולת הקלטת נתוני ניווט על גבי קובץ
.
מצב סימולציה לשחזור ההתקדמות על פי זמני ההקלטה
.
מצב
Final Path
לשרטוט הדרך תוואי הדרך
.
תמיכה בטעינת קובץ ניווט נוסף המשמש לייחוס
.
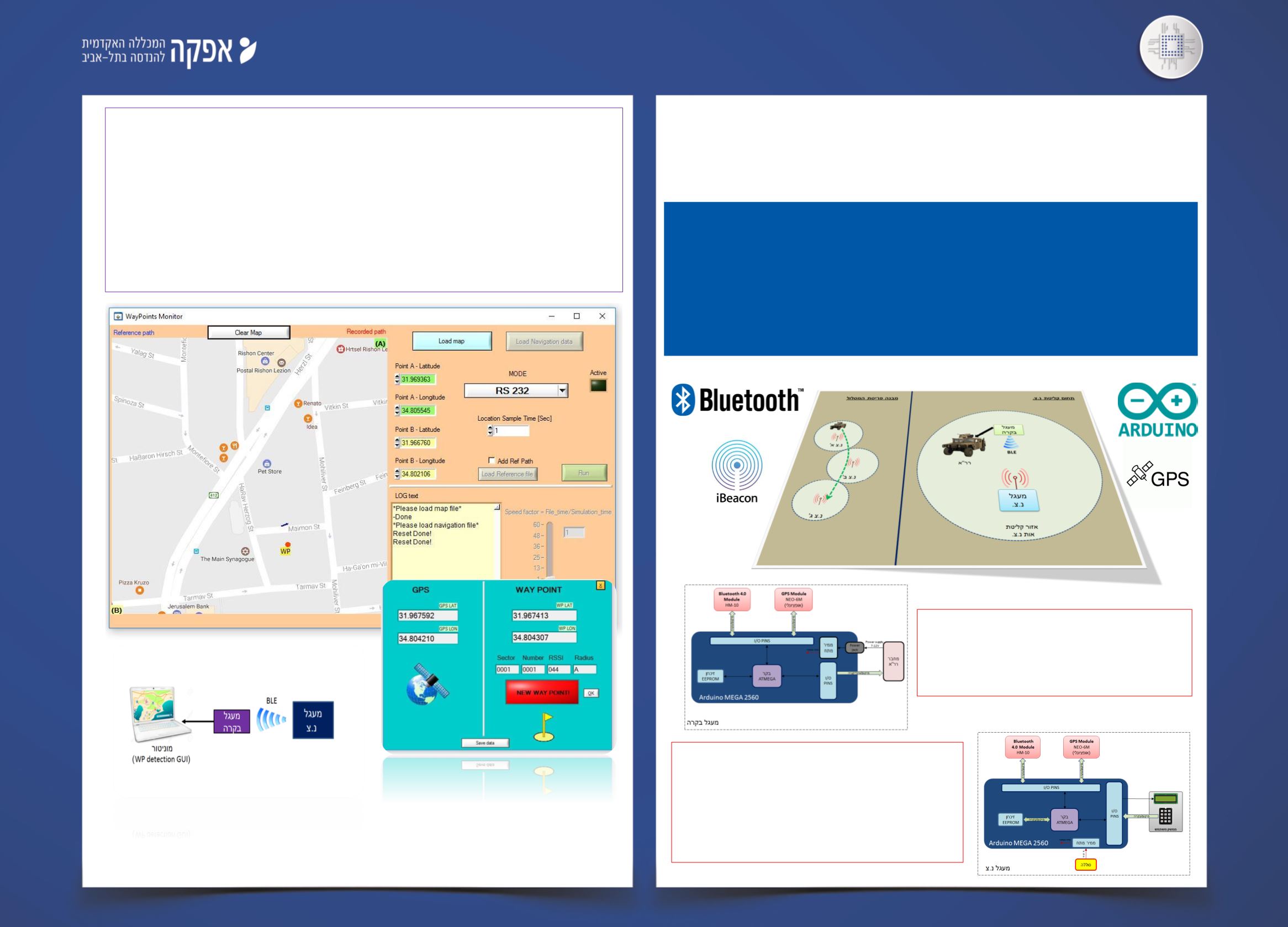
מעגל בקרה
•
ממוקם ברכב וסורק אחר נקודות בקרה באופן
. רציף
•
שולח במוצאו תקשורת חד כיוונית הכוללת
נתונים שאסף אודות המיקום ונקודות הבקרה
.
.צ. מעגלי נ
•
מפוזרים בשטח לאורך המסלול
.
•
ניתנים להגדרה ראשונית ע
"
י המשתמש באמצעות
פאנל בקרה
.
•
יכולים לעבוד
עד כשנה
לאחר הצבתם בשטח
.
•
מאפשרים להגדיר מספרי תחומים שונים לאורך
. המסלול